
波士顿动力Atlas机器人采用强化学习技术,成功实现了行走、跑步、爬行等多种动作的自主完成。该机器人具备高度智能和灵活性,能够在不同环境下适应并完成任务。其强化学习系统的应用,使得机器人在动作执行上更加精准、稳定,并具备自我学习和优化能力。这一成就标志着机器人技术在动态运动控制领域取得了重要进展。摘要字数控制在100-200字之间。
本文目录导读:
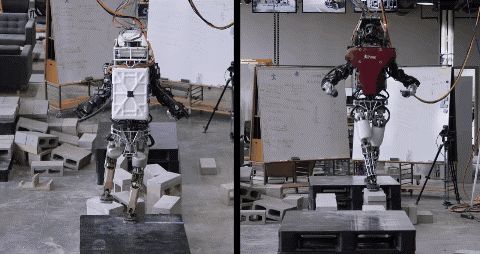
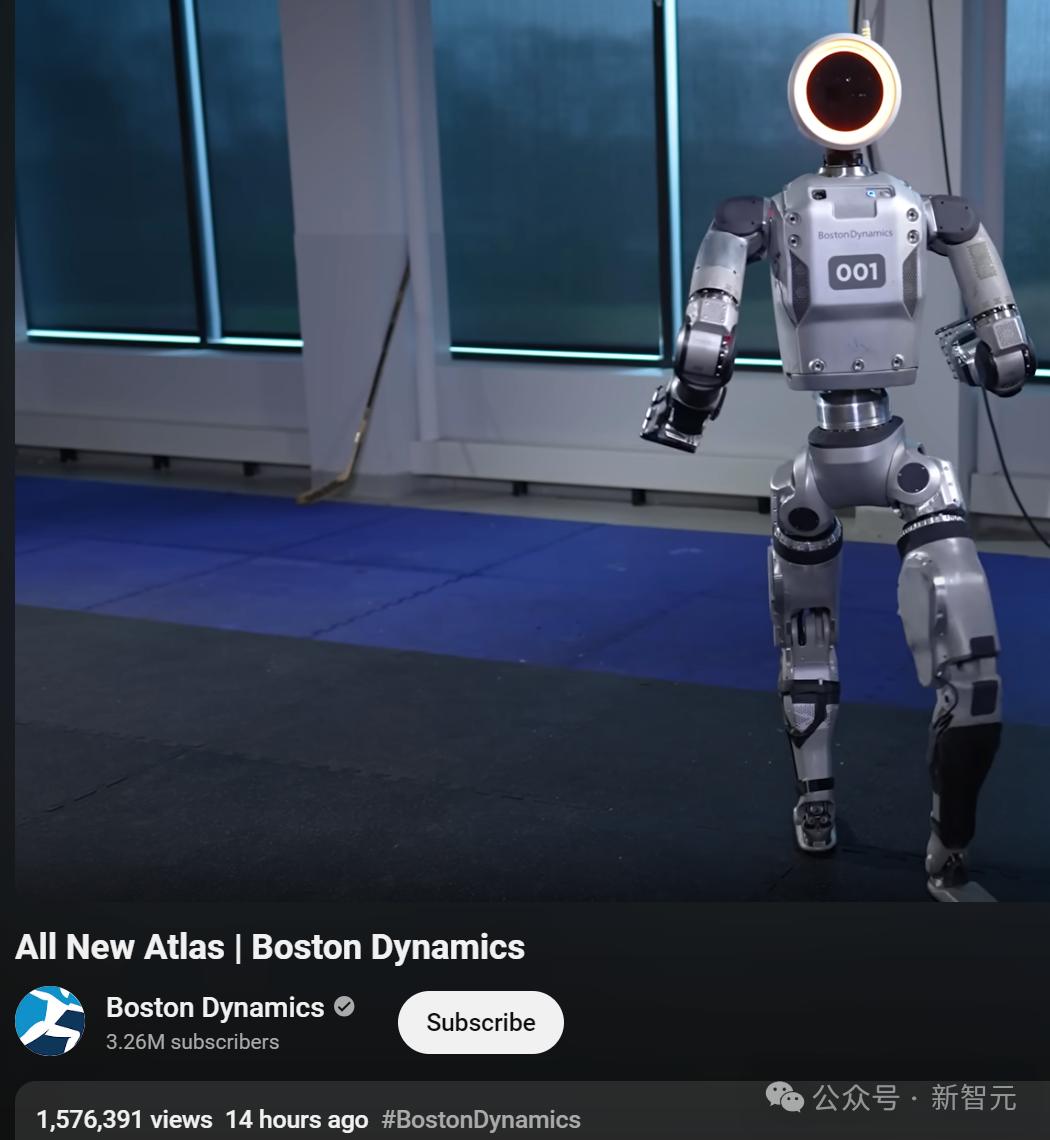
2025年3月19日,波士顿动力发布了一段令人瞩目的视频,展示了Atlas机器人通过强化学习实现行走、跑步、爬行等多种动作,这一进展在机器人技术和人工智能领域引起了广泛关注,本文将对该视频进行评价,探讨其技术意义、潜在应用以及对未来机器人技术发展的影响。
视频中,Atlas机器人展示了多种动态运动模式,包括行走、跑步、爬行等,这些动作在机器人的运动中显得非常流畅和自然,通过强化学习技术,Atlas机器人能够在不同地形上自主适应并完成任务,视频中展示了机器人在不同地面条件下,如平坦地面、楼梯、斜坡等,进行动态调整,实现稳定运动。
技术评价
1、强化学习应用:强化学习作为一种重要的机器学习技术,在机器人控制领域具有广泛应用,Atlas机器人通过使用强化学习,可以在不需要精确模型的情况下,通过与环境互动来学习和改进其行为,这使得机器人在面对复杂和不确定环境时,具有更强的适应性和鲁棒性。
2、动力学和运动规划:实现行走、跑步、爬行等多种动作,需要解决复杂的动力学和运动规划问题,Atlas机器人的成功展示表明,其在动力学和运动规划方面取得了显著进展,为机器人技术在更多领域的应用提供了可能。
3、自主性:Atlas机器人能够在不同地形上自主适应并完成任务,显示出其强大的自主性,这种自主性对于机器人技术在救援、勘探、农业等领域的应用具有重要意义。
应用与前景评价
1、救援领域:Atlas机器人在灾难现场可以执行危险任务,如搜索被困人员、检测结构安全性等,其强大的运动能力和自主性使其在救援领域具有广阔的应用前景。
2、勘探领域:在勘探领域,Atlas机器人可以执行远程勘探任务,如探索极端环境、采集样本等,其强大的适应性和运动能力使其能够在复杂地形和恶劣环境下工作。
3、农业生产:Atlas机器人在农业生产中可以执行自动化作业,如播种、施肥、除草等,其自主性和高效性可以提高农业生产效率,降低人力成本。
4、技术发展:Atlas机器人的进展表明,机器人在动态环境适应、自主决策等方面取得了显著进步,随着技术的不断发展,未来机器人将在更多领域发挥重要作用,推动科技进步和社会发展。

潜在挑战与问题
尽管Atlas机器人在技术上取得了显著进展,但仍面临一些潜在挑战和问题,强化学习算法的效率、机器人的耐用性和成本等问题仍需进一步解决,随着机器人技术的不断发展,也需要关注伦理和社会问题,如机器人替代人类工作、机器人安全等。
波士顿动力发布的Atlas机器人使用强化学习实现行走、跑步、爬行等动作的视频展示了机器人在技术和应用方面的显著进展,这一进展在救援、勘探、农业生产等领域具有广泛的应用前景,仍需关注潜在挑战和问题,推动机器人技术的持续发展和进步。
 京ICP备11000001号
京ICP备11000001号